


Ursa Minor MC3 Teleskopsteuerung
Der deutscher Text ist nicht up-to-date. Bitte wenden nach Englisch Seite !
Main features
- Freely configurable to most of the telescope mounts
- Easy to use Hand Control Unit with graphic display
- Internal astronomical database with 50000 objects
- Meade LX200 protocol: Compatible with most of the planetarium programs.
- Battery backed real time clock in the Handset. Does not forget the time and place!


Info über den UrsaMinor MC3-Handcontroller können Sie in einer separaten Anleitung lesen.

Einleitung
Dieses Gerät dient zur Steuerung für mittlerer bis großer Teleskopmontierungen, mit GoTo (automatische Positionierung) und AutoGuiding Funktionen. Das Gerät kann zwei separate Zwei-Phasen-Schrittmotoren mit getrennt einstellbaren Parametern steuern.
Unterstützte Montierungen
An die MC3 lassen sich viele verschiedene Montierungen anpassen. Ob Ihre Montierung schafft es oder nicht hängt nur von 2 Parametern: Die Motoren, welche Ihre Montierung verwenden und die Gesamt-Untersetzung.
- Fornax-50, Fornax-51, Fornax-100, Fornax-150 (alte und neue Zahnriemen-systme)
- Die Fornax Montierungen (Entwickler: Pal Sari) wurden in Ungarn entwickelt und die Entwickler-Team arbeitet mit UrsaMinor-Team eng zusammen. Alle evtl. spätere Änderungen (sowohl bei Fornax-Family, als auch bei UrsaMinor MC-Family) werden zueinander angepasst. Falls Sie die Montierung und Stezuerung gleichzeitig kaufen, werden die zueinander angepasst geliefert Sie erhalten von uns ein „Schlüsselfertiges System“.
- Stabi Montierungen (200 und 400-er Versionen)
- Diese Montierungen mit ca. 30-35kg Tragekraft wurden auf Antrag von einem renommierten Teleskophersteller auch in Ungarn entwickelt und schliessen die Lücke zwischen EQ6 und Gemini42. Der Entwickler-Team (Peter Vizi und Janos Toth) arbeitet mit UrsaMinor-Team eng zusammen. Alle evtl. spätere Änderungen (sowohl bei Stabi-Family, als auch bei UrsaMinor MC-Family) werden zueinander angepasst. Falls Sie die Montierung und Stezuerung gleichzeitig kaufen, werden die zueinander angepasst geliefert Sie erhalten von uns ein „Schlüsselfertiges System“.
- Gemini G40-41-42
- Die standard-Steuerungen von Gemini (nicht Losmandy-Gemini aus der USA, sondern Gemini von Herrn Andras Dan aus Ungarn) ist die Pulsar. Die MC3 ist nur eine preiswerte alternative, welche aber die Spezialfunktionen nicht übernehmen kann. Die MC3 kann die ältere G40-G41-G42 Montierungen steuern (Untersetzung 432)
Verwendungsbereiche mit Computer oder als Stand-Alone
Falls Sie die MC3 ohne Laptop verwenden möchten, brauchen Sie noch eine Handbox dazu. Hier sind die verschiedene Möglichkeiten:
- Ursa Minor Handset
- Kleine Handsteuerung mit graphischen Display, welche neben den Standard Steuerbefehlen (Datenbank über 50.000 Objekte, GoTo befehle usw…) auch alle Funktionen der UrsaMinor mcconfig übernimmt. Weitere Infos...
- Steuerung durch Computer, mit Ursa Minor PRO Planetariumsoftware
- Die UrsaMinor PRO Software unterstützt DIREKT den MC3 und braucht keine zusätzlichen ASCOM Driver. Die schmalprogrammierte Software, in der DSLR-Auslösungsserie, Autoguider-Kommunikation durch Guide-Master und GoTo-Befehle implementiert sind, ermöglicht die Einstellungen aus „einer Hand“ und lässt weniger Fehlerquellen zu. Die Autoguider Signale laufen durch das gleiche Kabel wie die GoTo Steuerung und Nachführung (Kabelsalat wird dadurch auch reduziert).
- Steuerung durch Computer, mit ASCOM Driver
- MC3 ist Meade LX200 kompatibel. Jede Software welche mit ASCOM läuft, läuft auch mit MC3.
- Auto Guiding durch Computer oder MGEN, aber Steuerung mit Handbox
- Wenn das Autoguiding über Computer (z.B. USB Camera, wie ALCCD5 o.ä.), oder MGEN (Standalone Autoguider) erfolgt, die MC3 leitet die ST4 Befehle weiter.
Datenblatt
Funktionen und Support
| MC3 1.0. und 1.1. | MC3 1.2. | MC3-Stabi | MC4 1.3. | |
|---|---|---|---|---|
| Spannung | 12V - 36V DC | 12V - 36V DC | 9V - 36V DC | 12V - 30V DC |
| Stromaufnahme | 2,5A | 2,5A | 2,5A | 4A |
| Max. motorstrom | 1,2A | 1,4A | 1,4A | 2,5A |
| Compatibility with Ursa Minor Hand Control | - | + | + | + |
| Compatibility with Synta Synscan Hand Control | + | + | + | + |
| USB port | + | + | + | + |
| Autoguider port | + | + | + | + |
| DSLR output | + | + | + | + |
Bemerkung: Die Max. motorstrom ist die Impuls-Spitzenwert pro Spulen.
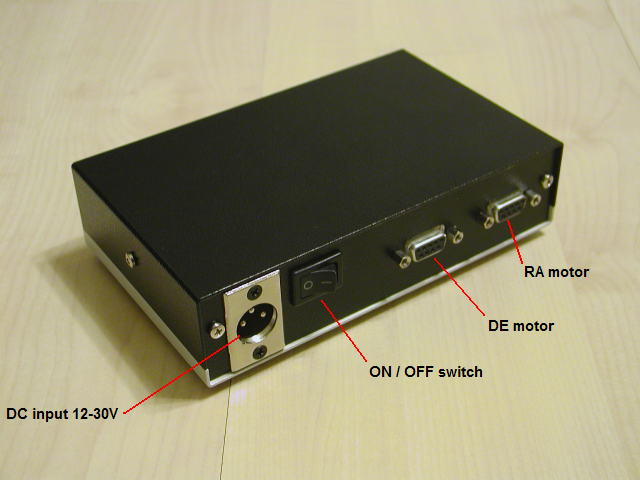
Stecker an der Vorderseite
An der Vorderseite befinden sich (von links nach rechts)
- der Autoguider Port (ST4-Kompatibel für MGEN oder ALCCD u.a.)
- zwei Handboxeingänge (die beiden Eingänge sehen zwar von draußen gleich aus, haben auch die gleiche PIN-Belegung, sind aber elektronisch unterschiedlich: Der erste wurde streng für die SynScan Handbox und das UrsaMinor BlueTooth Interface optimiert, der zweite ist für MC3-Handbox, welche wesentlich unempfindlicher auf Impulsschwäche ist und deshalb u.a. mit bis zu 50m Kabel verwendet werden kann)
- ein USB Port (für mcconfig Konfigurations-Software oder EQASCOM-Kompatibel Programme)
- und ein DSLR Ausgang (mit EOS-1000 kompatiblen Stereo Jack mit 2,5mm Durchmesser).
Stecker an der Hinterseite
Hier zu finden sind die Stromversorgung, der Ein/Aus Schalter sowie zwei DB-9 Stecker für die zwei Motoren.
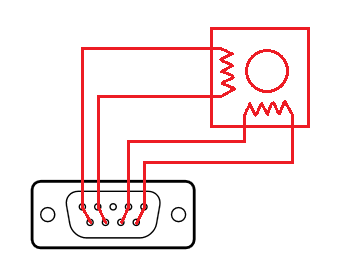
Connecting of the motors: Recommended way:
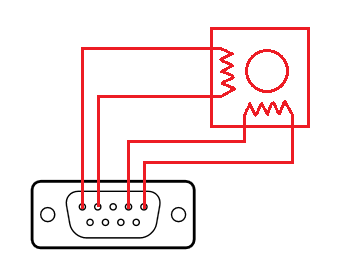
Connecting of the motors: FS2 compatibile mode:
Wichtig einzustellen: Ost-West Stellung der Montierung!
Eine wichtige Information ist unbedingt noch zu klären, bevor Sie die MC3 Steuerung verwenden möchten. Die deutschen äquatorialen Montierungen können ein Himmelsobjekt in zwei verschiedene Stellungen anpeilen. Entweder ist das Teleskop an der Ostseite und das Gegengewicht im Westen (optimal für Objekte an die südwestlichen Himmel), oder umgekehrt: das Teleskop ist an der Westseite und das Gegengewicht im Osten (optimal für Objekte in die Südost Himmelsregion). Auf halbem Weg von Ost nach West sollte die Stellung des Teleskops umgeschwenkt werden (Meridianflip) um eine spätere Kollision mit der Säule zu vermeiden. Diese Meridianflip lässt sich in der UrsaMinor PRO Planetariumssoftware frei konfigurieren (siehe später).
Bevor aber das „Star-alignment“ gemacht wird, müssen wir der Steuerung „sagen“, in welche der beiden Stellungen das Teleskop gerade positioniert ist. Zusammengefasst:
- Westseite: Teleskop an der Westseite des Tripods/Säule, (GGW im Osten)
- Ostseite: Teleskop an der Ostseite des Tripods/Säule (GGW im Westen)
Checkliste bevor Sie losstarten
Zusammenbau, Verkabelung
Achtung! Alle Kabel dürfen nur im ausgeschalteten Zustand gesteckt und/oder entfernt werden!
- Stecken Sie beide Motorkabeln in den RICHTIGEN DB-9 Stecker (DEC zu DEC und RA zu RA). Häufiger Fehler!
- Stecken Sie die Stromversorung (12V bis 30V) an die MC3, aber schalten Sie die MC3 noch nicht ein!
- Stecken Sie die Handbox oder Computersteuerung an einen Stecker (entweder-oder, siehe die Warnung an der Seite 4). Für die allererste Konfiguration brauchen Sie den Computer und das mcconfig Konfigurationsprogramm.
Kontakt mit dem Computer durch USB-Port
- Laden sie den FTDI USB-Seriell driver herunter (falls im Windows-System noch nicht implementiert wäre) http://www.ftdichip.com/Drivers/D2XX.htm Setup exe RECHTS unter "Comments"
- Verbinden Sie den Computer per USB-Kabel mit der MC3
- Schalten Sie die MC3 ein.
- Ermitteln Sie, welche COM Port-Nummer der MC3 erhalten hat (Win Gerätemanger)
- Starten Sie die „mcconfig“ Software für die Erst-Konfiguration. Sie finden die aktuelle mcconfig auf unserer Website beim Produkt unter "Support"
Grundeinstellungen
MC3 ist normalerweise für Fornax konfiguriert. Aber auch wenn Sie eine Fornax Montierung haben, kann es nötig sein, einige Werte vor Ort optimal anzupassen (GoTo Geschwindigkeit, Rampen, Stromwerte usw...)
Dafür dient die mcconfig Konfigurationssoftware. (wenn Sie eine MC3 verwenden, welche noch vor 2012 April geliefert wurde, bitte kontaktieren Sie uns um die richtige Konfigurationssoftware zu erhalten).
Die Software muss nicht installiert werden. Einfach das zip-File entpacken und sofort verwenden. So sieht die Oberfläche aus:
Und so kann die Gesamtuntersetzung eingestellt werden:
WICHTIG, BITTE BEACHTEN!!!: Die „mcconfig“ Software verlangt, das Teleskop an der OSTSEITE zu positionieren. Das Gegengewichtsstange soll zum Westhorizont zeigen, das Teleskop ist an der Ostseite und zeigt genau nach Süd, Richtung Himmels-äquator (also ca. 45 Grad schräg aufwärts – siehe Bild)
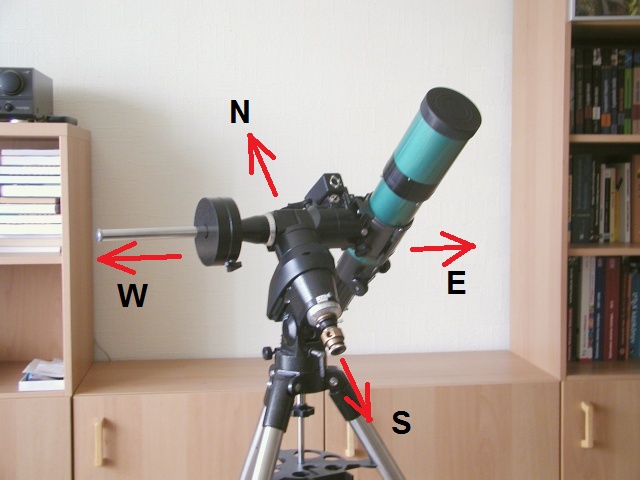
Warum wurde diese Ausgangsposition definiert?
- Weil ein Referenz-Stern in Äquatornähe die genaueste GoTo Positionierung ermöglicht (weit genug von Himmelspol, aber die sichtbare Position wird von atmosphärischer Refraktion noch nicht sehr beeinflusst)
- Bei Fotografie befinden sich die optimalen Zielpunkte in der Zenitnähe, welche auch relativ nah zum diesen Ausgangsposition sind
- Von dieser Position brauchen wir keinen Meridianflip mehr, bis das Objekt untergeht.
- Schließen Sie die MC3 am Computer an, wenn Sie es nicht bereits getan. (USB-Kabel im Lieferumfang enthalten)
- Schalten Sie die MC3 ein und starten Sie die „mcconfig“ Software.
- Links oben wählen Sie den richtigen COM Port, welcher Ihre USB-Verbindung von Computer automatisch zugeordnet wurde. (evtl. im Gerätemanager suchen)
- Drücken Sie „Connect“ und warten Sie bis die Verbindung zustande kommt. Es erscheint die Nachricht: "Connected".
- Jetzt stellen Sie alle Parameter nach Ihrem Wunsch ein. (die empfohlenen Strom und Rampenwerte finden Sie in eine Tabelle zusammengefasst – wird ständig ergänzt).
- Überprüfen Sie ob die Untersetzungen richtig eingestellt sind. Wenn notwendig, modifizieren Sie es (siehe Tabelle auf den letzten Seite).
- Links (nicht ganz) oben sind 4 Pfeiltasten. Mit diesen Tasten können Sie überprüfen, ob die Motoren sich ansteuern lassen oder nicht. Wenn Sie eine Taste drücken, bleibt diese aktiv, bis Sie in der Mitte den Knopf „STOP“ drücken. Solange Sie den STOP Knopf nicht drücken, bewegen sich die Motoren.
- Unter den 4 Pfeilknöpfen ist ein Schieber. Mit diesem Schieber können Sie die Geschwindigkeit regeln. Ganz rechts ist die Maximale Geschwindigkeit, ganz links ist 1/16 Sterngeschwindigkeit. Für die siderische- und doppelt-siderische Geschwindigkeiten sind zwei weitere Knöpfe vorhanden. Zur Überprüfung stellen Sie eine mittlere Geschwindigkeit ein.
- Überprüfen, ob der RA-Motor sich in die richtige Richtung bewegt. Dazu drücken Sie den „Track“ Knopf. Die Nachführung wird eingeschaltet.
- Beobachten Sie im Teleskop, ob die Sterne im Sehfeld bleiben, oder mit doppelte Sterngeschwindigkeit an die umgekehrte Richtung auswandern.
- Wenn der RA-Motor in die falsche Richtung läuft, aktivieren Sie den Haken in der „Reverse Rotation“ Checkbox.
- Genau so überprüfen Sie die Drehrichtung des DEC-Motors, nur hier selbstverständlich mit den Pfeiltasten aktivieren Sie die Achsenbewegungen statt den „Track“ Befehl. Dafür brauchen Sie eine höhere Geschwindigkeit als die siderische.
- Wenn Sie alle wichtige Parameter eingestellt haben (auch die Stromwerte, Stromkurvenformen, Geschwindigkeiten, Rampen usw…) speichern Sie bitte die Konfiguration, indem Sie den „Write to EEPROM“ Knopf drücken. Ab jetzt arbeitet der MC3 Emulator mit der so eingestellten Parametrisierung. Sie können jetzt die Computerverbindung trennen, wenn Sie die Montierung mit einer Handbox betreiben wollen.
- Bitte für die individuelle Motorstrom-Konfiguration auch diesen Artikel lesen: Motorkabel_richtig_anschliessen.pdf – auf unserer Webseite in der MC3 Präsentation / Support Öhrchen.
Verwendung mit UrsaMinor PRO Software ohne Handbox
Fix aufgestellte Montierungen brauchen meistens keinen Handbox-Betrieb. Alle Funktionen werden von der UrsaMinor PRO Planetariumsoftware gesteuert. Die kann auch in einem Remote-Computer installiert werden.
Zeit und geogr. Position einstellen
Es ist überaus wichtig, dass der Steuerung die richtige Zeit und Position eingestellt wird. Ohne diese Informationen kann ein GoTo System nicht richtig arbeiten. Diese Einstellungen finden Sie im Menüpunkt: „Einstellungen / Zeit“ bzw. in die „Einstellungen / Geogr. Position“.
Meridian flip (Ost-West Schwenk) einstellen
Wir haben bereits erklärt, was Ost- und Westseite bei einer Montierung bedeutet und warum notwendig ist, manchmal von West nach Ost zu wechseln. Dieser Meridianflip kann in drei verschiedenen Weisen automatisiert werden.
Anmerkung: in diversen Planetariumsoftwares erfolgt der Meridianflip automatisch beim Meridian. Bei Automatisierung kann der Meridianflip dann auch während eine Langzeit-Aufnahme „plötzlich“ passieren und damit wird das Rohbild unbrauchbar. Bei der UrsaMinor PRO Planetariumsoftware gibt es drei Möglichkeiten mit dem Meridianflip umzugehen (Menüpunkt: Teleskop / Meridianflip)
- Manuell
- Selbstverständlich bedeutet manuell nicht, dass wir jetzt händisch den Meridianflip machen müssen. Es bedeutet, dass die Software keinen selbstständigen Meridianflip macht. Falls wir es wollen, können mit zwei Mausklick den Meridianflip Befehl erteilen und die Montierung reagiert darauf genau in dem Zeitpunkt, wann wir es wollen.
- Vollautomatisch
- Die Software entscheidet selbst, wann ein Meridianflip stattfinden soll und führt den auch selbstständig durch.
- Programmierbar
- Ähnlich, wie die Vollautomatische Meridianflip, aber wir können eine Linie vorgeben (z.B. 20 Grad nach Meridian), wann die Durchführung stattfinden soll.
WARNUNG: Bitte achten Sie immer darauf, dass Teleskopzubehör und/oder Kabel während des Meridianflips nicht mit der Säule/Tripod kollidieren oder sonstwie hängen bleibt! Nur bei manueller Einstellung ist es gewährleistet, dass die Montierung keinen selbstständigen Meridianflip macht.
Durchstarten mit MC3 und Ursa Minor Pro Programm
Nach der erfolgreichen Erstkonfiguration können Sie die MC3 verwenden. Folgende Schritte sind nötig:
- Verbinden Sie die MC3 mit Ihrem Computer. Schalten Sie die MC3 ein und starten Sie die UrsaMinor PRO Software.
- Vergewissen Sie sich, dass die Zeit, Zeitzone, geogr. Koordinaten richtig eingestellt sind. Falls nötig, aktualisieren Sie sie.
- Wählen Sie den Menüpunkt: Teleskop / Teleskop Steuerung
- Es öffnet sich ein neues Fenster. Dieses Fenster kann ständig offen bleiben ohne das Hauptfenster (= wo u.a. die Sternkarte sichtbar ist) zu beeinflussen.
- Wählen Sie oben links den „Connect“ Knopf. Im erscheinenden Fenster wählen Sie „UrsaMinor MC3 direct“. Auch hier wählen Sie den richtigen COM-Port (welche Sie bei der Erstkonfiguration bereits ermittelt haben), worüber der Computer mit der MC3 kommunizieren kann (durch USB).
- Oben erscheint die "Connecting", dann bald darauf die "Connected" Nachricht.
- Mit den 8 Pfeiltasten (langsam und schnell je Richtung) können Sie jetzt die Montierung steuern. Die Tastenknöpfe bleiben nach Anklicken aktiv. Mit der STOP Knopf können Sie die Bewegungen stoppen.
- Am unteren Teil des Panels können Sie ablesen, ob die MC3 das Teleskop an der Ost- oder an der West-Seite identifiziert hat. Die UrsaMinor PRO Software nimmt die Ost-Seite als Default-Einstellung (Siehe Seite 5 und Seite 7). Wenn die Seiten-Auswahl richtig ist, überspringen Sie den Punkt 9
- Wenn das Teleskop NICHT in der Ost-Stellung steht, dann können Sie es in zweierlei Weise korrigieren
- Sie stellen das Teleskop in die Ost-.Stellung (händisch, oder mit den Motoren per Tasten) und bestätigen der Software, dass das Teleskop an die Ost-Stellung ist.
- Sie lassen den Teleskop auf der West-Seite und drücken den Knopf „Set to west“.
- Jetzt aktivieren Sie die Nachführung mit dem "Tracking" Knopf. Der Knopf bleibt nach Anklicken aktiv. Deaktivieren können Sie es, wenn Sie den „Track“ Knopf erneut anklicken.
Referenz-Stern einstellen
Das Programm kann jetzt zwar bereits nachführen (kennt die Richtungen, und auch auf welcher Seite das Teleskop steht, aber noch ohne konkrete Koordinaten), aber kann noch keine Objekte automatisch positionieren. Dafür braucht es einen Referenz-Stern, dessen Position bekannt ist
- Jetzt stellen wir das Teleskop mit den Pfeiltasten einen von uns bekannten Stern ein. Der Referenzstern kann jeder
Stern sein, welche auf der GLEICHEN Teleskopseite ist, wohin das Teleskop sieht (also ohne Meridianflip zu erreichen
ist). Bei der Default-Einstellung (Ostseite = Teleskop an die Ostseite, Gegengewicht an die Westseite, Teleskop sieht
nach Süd, Südwest oder West) soll der Referenzstern also auch in Süd, Südwest oder West stehen, möglichst
Himmelsäquator-Nähe.
Anmerkung: Den Referenzstern zu positionieren ohne Handbox ist oft unbequem. Man soll durch das Okular den Stern zentrieren, für die Bewegung der Montierung jedoch mit der Maus die Tasten treffen. Das ist auch mit anderen Planetariumssoftwaren unbequem. Tipp: UrsaMinor PRO bieten Ihnen die Möglichkeit eine handelsübliche Spielkonsole (Gamepad, Joystick) zu verwenden (wo ein Kind in der Familie ist, dort meistens eh‘ vorhanden, sonst um ca. 20-30 EUR zu kaufen). Die Tastatur-Belegung ist sicher erst gewöhnungsbedürftig, aber es erleichtert tatsächlich die Positionierung eines Referenzsternes und macht Spaß!
- Jetzt suchen Sie diesen Stern auch in der Sternkarte aus, klicken ihn mit der rechten Maustaste an und wählen Sie den „1. Referenzpunkt, "Teleskop zeigt jetzt hierher“.. (Anmerkung: es gibt auch einen „2. Referenzpunkt“, dieser wird aber nur bei Azimutalen Montierungen verwendet.)
- Nun ist das Programm bereit zur Verwendung.
Sie sollten jedoch darauf achten, dass die Positionierung nur an der selben Himmelshälfte präzise ist, an welcher der Referenzstern sich befindet. Dies hat vor allem geometrische Gründe (z.B. die optische Achse eines Newton Teleskop ist nicht unbedingt parallel mit der DEC-Platte, wo sie montiert ist, usw…). Wir empfehlen deshalb nach einen Meridianflip ein neuen Referenzstern zu wählen, und GoTo erst danach zu verwenden. Die Nachführung selbst bleibt nach einen Meridianflip weiterhin präzis (da es nur mit der RA-Achse zu tun hat).
ACHTUNG: Beim Meridianflip achten Sie auf das verschiedenen Zubehör und Kabel, welche hängen bleiben oder mit der Säule kollidieren können.
WICHTIG, BITTE BEACHTEN: Ein MeridianFlip darf NIE HÄNDISCH (d.h. die Klemmschrauben lösen und mit Hand umstellen) erfolgen, sonst verliert die Montierung nicht nur die Positionen, sondern vertauscht auch die West- und Ost-Seite und die DEC Motoren drehen scheinbar nachher in die falsche Richtung. Eben deshalb sind die Knöpfe "Flip to East" und "Flip to west" am Bedienungspanel platziert.
Verwendung mit UrsaMinor Handbox
Das MC3 Handbox wurde direkt für die MC3-Steuerung entwickelt. Die Handbox ist mit anderen Steuerungen nicht kompatibel. Die Bedienungsanleitung der MC3 Handbox ist separat bei den „Bedienungsanleitungen für Steuerungen“ zu lesen.
Verwendung der SynScan Handbox von Synta
Achtung: vor der ersten Verwendung brauchen Sie den Computer, um die MC3 Steuerung zu konfigurieren. Darüber lesen Sie auf die Seiten 5 bis 7.
Die meistverwendeten SynScan Befehle, (GoTo, Tracking, Manuelle Steuerung, Geschwindigkeit-Auswahl usw…) sind wie gewohnt ausführbar. Einige Befehle werden aber nicht von beider Seiten unterstützt (z.B. PEC Einstudierung der SynScan an einer Seite, oder Kamerasteuerung der MC3 von der anderen Seite usw…)
Verwendung mit UrsaMinorPRO Software und BlueToth (EQ6BUMi mit DB9RJ45 Adapter)
In diesem Fall ist die MC3 voll im Emulations-Mode. Der Computer "sieht" nicht einmal die MC3 als MC3 (!), sondern als ob es eine Synta EQ6Pro Montierung wäre. Die Arbeitsschritte:
- MC3 für Montierung durch mcconfig Software konfigurieren, Daten speichern und Verbindung trennen.
- BlueTooth Modul an den linken RJ45 Stecker, (also, welcher für die Synta Handbox vorhergesehen ist) stecken.
- BlueTooth Modul wird von Computer erkennt (PIN: 0000) 4. UrsaMinorPRO Software starten
- Als Montierung EQ6-PRO (!) auswählen - MC3 emuliert/simuliert als ob die Großmontierung eine EQ6-PRO wäre.
- Durch UrsaMinorPRO die Montierung, wie eine Synta EQ6-PRO steuern.
Autoguiding durch Computer
Hier erwähnen wir noch kurz, wie MC3 mit einer Fremdsoftware welche auf einem Computer läuft zusammenarbeiten kann. In diesem Beispiel ist es " PHDGuiding", welcher die AutoGuider Befehle ausgibt. Diese Befehle werden von MC3 erfasst und an die Montierung weitergeleitet. Von Vorteil ist, dass es dafür kein zusätzliches ST4-Kabel braucht (geht aber auch damit), sondern die Signale direkt an die BD-9 Ausgänge weitergeleitet werden, welche an die RA- und DEC-Motoren direkt angeschlossen sind.
BEISPIEL-1 (GoTo Positionierung mit SynScan Handbox, PHDGuiding läuft am Computer, Großmontierung wird durch MC3 gesteuert)
- SynScan Handbox an MC3 einstecken
- Durch USB-Kabel MC3 mit Computer verbinden. (Autoguider-Port in MC3 wird NICHT belegt!!!)
- MC3 einschalten.
- COM Port für MC3 ermitteln
- PHDGuiding Software starten und COM-Port von MC3 mitteilen.
- In der PHDGuiding die Montierung „Meade“ wählen. MC3 versteht und führt die Autoguider-Signale aus.
BEISPIEL-2 (GoTo Positionierung mit UrsaMinorPRO, PHDGuiding läuft am selben Computer, Großmontierung wird durch MC3 gesteuert)
- MC3 mit Computer durch USB Kabel verbinden.
- MC3 einschalten.
- COM Port für MC3 ermitteln
- UrsaMinor PRO starten und COM-Port von MC3 mitteilen
- PHDGuiding starten
- Weitere Informationen (zzt. nur auf ungarisch): http://www.ursaminor.hu/manual_phdguiding_ursaminor_usb_hu.html